LSU Engineering Faculty Design Sensor to Improve Vision of Underwater Robots
March 31, 2022
 BATON ROUGE, LA – Underwater exploration is becoming more common these days thanks
to subaqueous vehicles that have capabilities to photograph and collect data at deeper
depths and for longer periods of time. These vehicles require the best imaging devices,
research that LSU Engineering professors Jinwei Ye and Corina Barbalata are working
on thanks to a three-year $499,496 National Science Foundation grant.
BATON ROUGE, LA – Underwater exploration is becoming more common these days thanks
to subaqueous vehicles that have capabilities to photograph and collect data at deeper
depths and for longer periods of time. These vehicles require the best imaging devices,
research that LSU Engineering professors Jinwei Ye and Corina Barbalata are working
on thanks to a three-year $499,496 National Science Foundation grant.
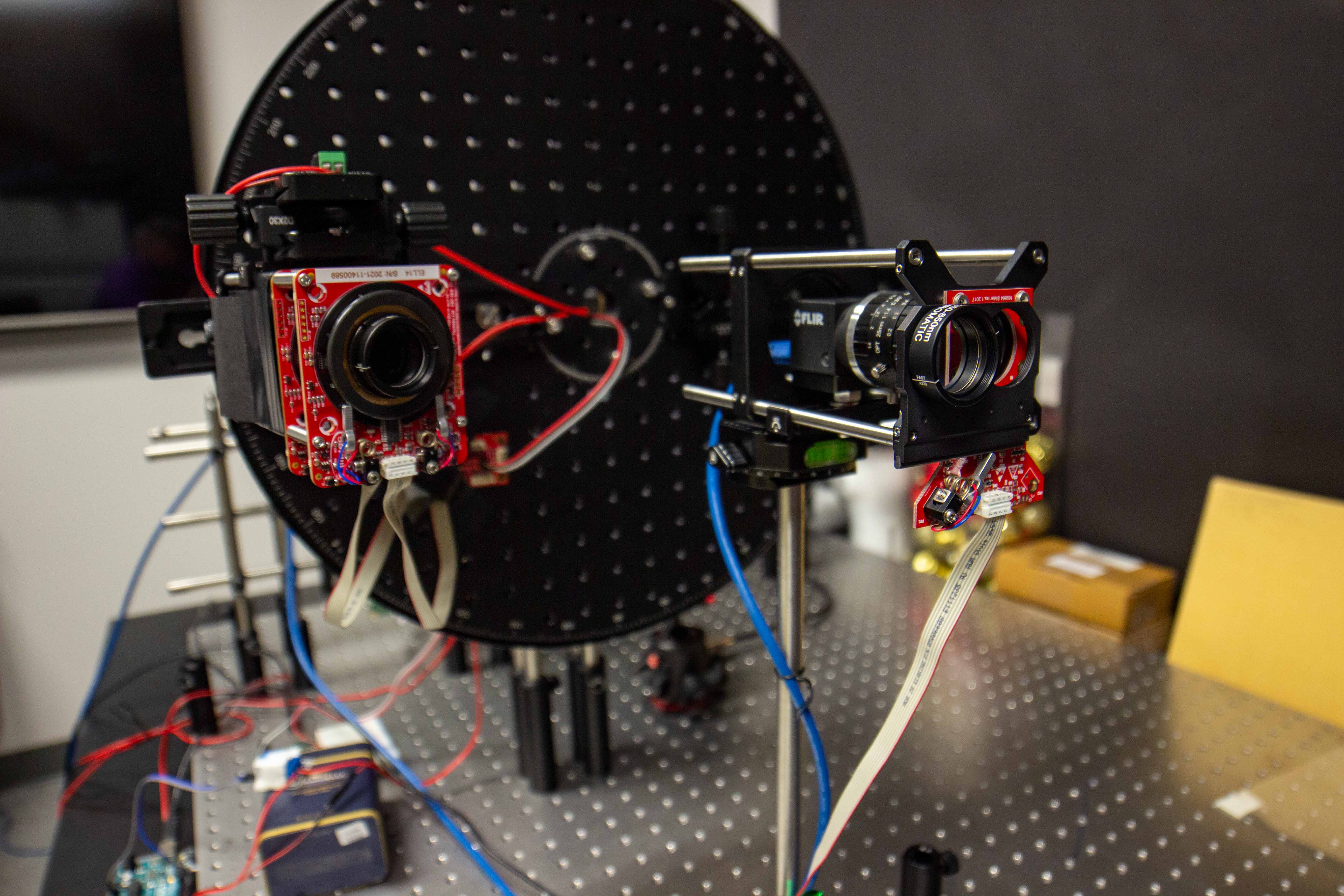
“We propose to develop novel angularly-sampled imaging systems and computational algorithms to advance the vision-sensing capacity of underwater vehicles,” Ye said. “The key idea is to couple angularly-encoded light sources with an angularly-sampled imaging device to acquire correspondences among light rays. We’ll integrate our imaging system with underwater marine vehicles and use it to facilitate robotic applications, such as autonomous navigation and sea floor mapping.”
The project will benefit the oil and gas industry, which can use it to inspect underwater pipelines; the military, which may be able to use their sensing technology for submarines and decreasing the cost, challenges, and risks associated with ocean exploration; and for researchers studying sea life and coral reefs.
Ye, who is an adjunct faculty member in the LSU Division of Computer Science and Engineering, says the first year of the project will be simulation, algorithm design, and theory development, while the second year will be experimentation in a water tank. The last year will involve field experiments in the Gulf of Mexico or nearby lakes.
 Barbalata, an assistant professor in the LSU Department of Mechanical & Industrial
Engineering, is helping with the testing of the imaging system that will be deployed
in an underwater vehicle and used to help the vehicle navigate the environment.
Barbalata, an assistant professor in the LSU Department of Mechanical & Industrial
Engineering, is helping with the testing of the imaging system that will be deployed
in an underwater vehicle and used to help the vehicle navigate the environment.
“We are going to look at tracking various aspects in the underwater environment and design a control structure based on this computational imaging system,” she said.
“The most challenging part of designing an underwater imaging system is to cope with the low visibility in murky water,” said Zhang Chen, a postdoctoral student who is working with Ye on the imaging system design for the project. “We design smart light sources whose emitted light rays are coupled with the receiving camera in order to ‘dodge’ the scattering particles in water.”
Ye said the underwater environment is very different from land, so the cameras they use must be designed differently.
“The better the robots can see, the better they can survey, and that info can be used as feedback for robot control,” she said.
Watch a short interview with Ye and Barbalata about the project here.
Like us on Facebook (@lsuengineering) or follow us on Twitter and Instagram (@lsuengineering).
###
Contact: Libby Haydel
Communications Specialist
225-578-4840
ehaydel1@lsu.edu